

消防機器人運動機構
更新:2021-07-14 02:59:44 點擊:
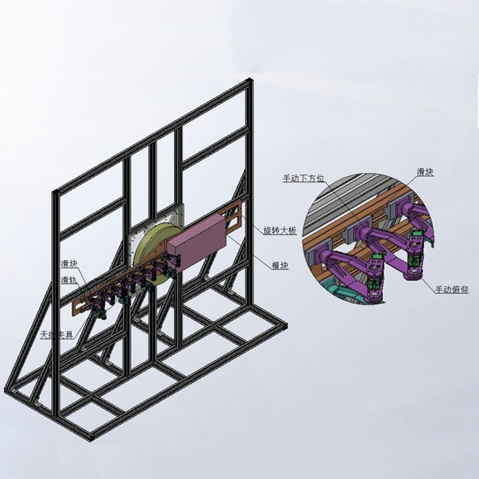
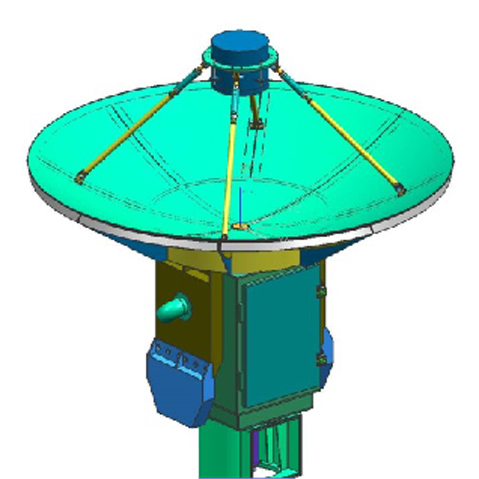
本運動機構主要包括下方位和上俯仰轉台及其驅動控制單元

詳情
本運動機構主要包括下方位和上俯仰轉台及其驅動控制單元,方位機構上采用“電機+渦輪蝸杆減速機”來實現目标的旋轉運動,俯仰采用“電機+蝸輪蝸杆減速機”來實現目标的上下運動,配置脈沖觸發(fā)信号,俯仰帶有電氣限位裝置。方位和俯仰采用了渦輪蝸杆,因此具備機械自鎖能(néng)力。電子器件均采用高溫防爆器件。

結構形式
下方位上俯仰型
運動範圍
方位/俯仰均爲-45°-45°
承重
≥360Kg
轉台精度
≤0.5°
電動速度
0-2°/S
其它功能(néng)
支持複位、開(kāi)始、點動控制;控制器與計算機通訊采用網口(可根據用戶指定);帶有限位,機械自鎖。
相關